马斯克“激光雷达傻瓜论”延烧:自动驾驶路线之争愈演愈烈,中国AI芯片机会来了!
新智元报道
编辑:克雷格
【新智元导读】特斯拉“全自动驾驶”(FSD)计算机发布,让马斯克有了更多diss激光雷达的底气,这背后是马斯克从押注摄像头到自研芯片再到自建车厂,试图打造出一条造车的闭环,但这条路真的好走吗?
“激光雷达傻瓜论”,引起了自动驾驶业界的集体反感,也让马斯克在计算机视觉这条路上越走越远。
实现自动驾驶,到底是激光雷达更容易还是摄像头更容易,业内已经争论多年,而目前量产车里面只靠摄像头的仅特斯拉一家,激光雷达虽然昂贵,但是3D空间物体精确定位是车企无法拒绝的技术。
不过,马斯克的“激光雷达傻瓜论”背后也有充足底气:芯片以及“全自动驾驶”(FSD)计算机,并且马斯克号称是“世界最好的芯片”。
从押注摄像头到自研芯片再到自建车厂,马斯克试图打造出一条造车的闭环,产业链也是一特斯拉为中心的生态圈,也难怪会被认为路数跟苹果相似。
但是造车毕竟不是造手机,特斯拉的路线到底是不是自动驾驶的捷径?
激光雷达VS摄像头:不必diss另一方
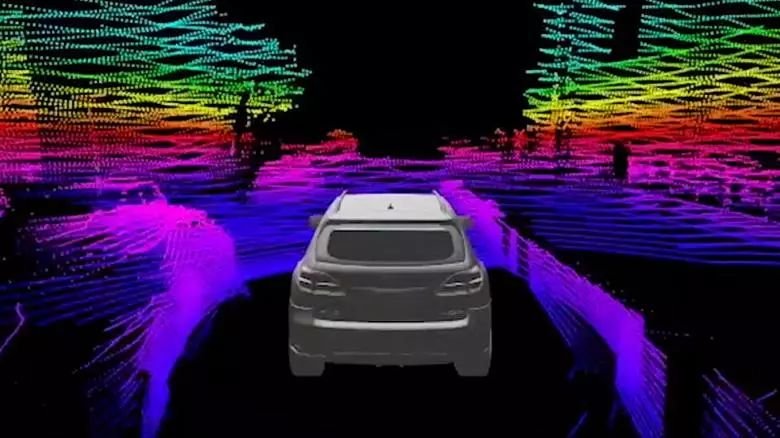
激光雷达与摄像头各有所长,就定位而言,激光雷达能估计3D空间中物体的精确定位,而目前使用相机(摄像头)进行定位的技术并不准确,因为它需要从2D到3D(例如使用立体视觉)进行定位,因此使用相机进行定位非常困难。尽管目前已经有利用深度学习的方法让相机本地化,但需要付出高昂的代价。
以下是摄像头和激光雷达在4个主要层面的比较:
1.成本:相机是一种廉价的传感器,而激光雷达的价格大于等于汽车的价格。
2.摄像头能看到颜色,因此可以做更好的检测和跟踪,而激光雷达不适合跟踪。
3.相机具有2D数据,因此定位非常困难,需要将其映射到3D,因此需要相机+激光雷达或多个相机。
4. 电源:摄像头可以通过USB供电,但是激光雷达需要插入外部适配器。
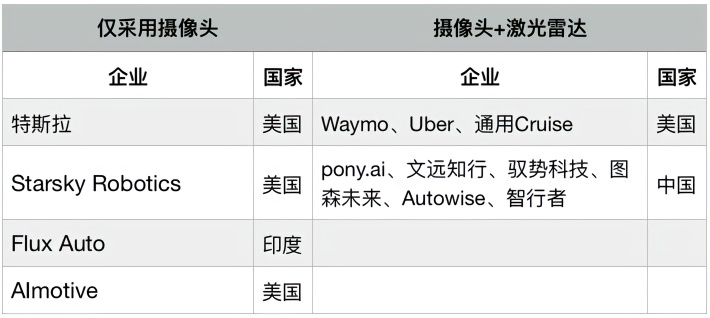
作为自动驾驶传感器最重要的部分:激光雷达和摄像头,两者形成不同的道路,马斯克频繁diss激光雷达,自然是摄像头路线的坚决拥护者。新智元初步梳理出了走两条路径的国内外自动驾驶企业名单(部分)。
走哪条路线并没有对错之分,不过,马斯克“激光雷达傻瓜论”既得罪了同行不说,也过于抬高计算机视觉的地位。就目前而看,深度学习带来计算机视觉效果距离自动驾驶所需的极高精度仍然有一段距离,新智元近期报道《一张贴纸欺骗AI,对抗性补丁让人类隐身,监控摄像危险了!》指出,借助一张简单打印出来的图案,就可以完美避开AI摄像头,骗过了YOLO (v2) 识别系统。

AI系统成功检测到左边的人,而右边的人被忽略了
另一方面,特斯拉在发布会上宣布,摄像头已经实现了99.9999%的准确率,但进入无人驾驶需要一个准确度高达1000000%的系统,而不是仅差0.0001%,因为即便是有0.0001%,也会出现致命车祸。

计算机视觉领域还值得关注的是,当深度学习工作时,我们并不严格知道它为什么会起作用,“黑盒”问题并没有解决。
当然,摄像头不完美不代表激光雷达完美,上文讲到激光雷达在成本、跟踪检测等方面还不如摄像头,此处不展开描述。
总之,目前行业普遍采用的方法是使用相机+激光雷达来更好地检测和定位,马斯克如果不是唯一一个,也是极少数做出二选一并且diss另一方的人。
特斯拉的“苹果”路线:造芯片押对了宝吗?
除了传感器的路线之争外,马斯克已经在特斯拉特色的道路上越走越远。
特斯拉最近发布的汽车大脑——FSD计算机,让特斯拉跻身成为能够设计AI芯片的科技公司。
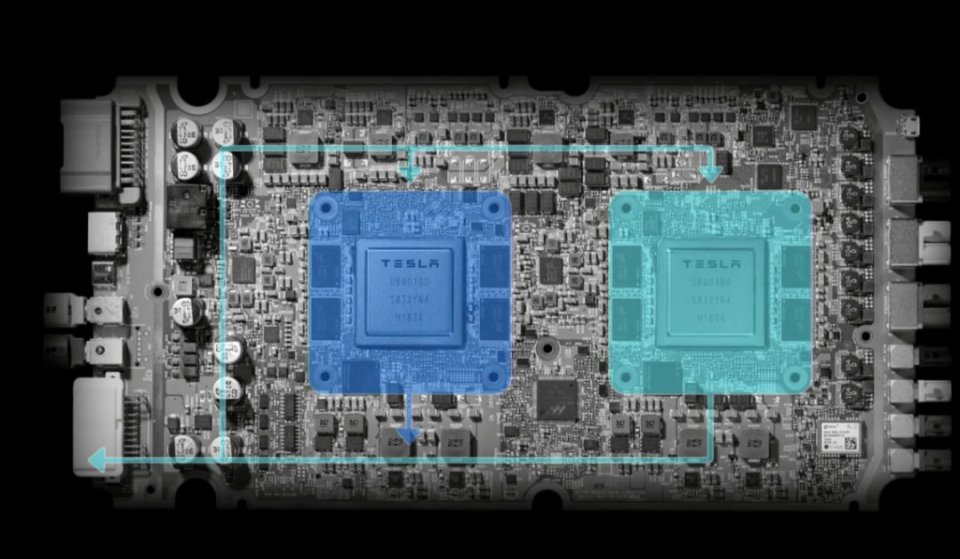
芯片由三星制造,每个FSD包含两个芯片,每个芯片都有两个专门设计用于运行神经网络的加速器,FSD每秒最多可执行144 TOPS神经网络性能,处理来自8个摄像头、12个超声波传感器、各种雷达、GPS和测绘的数据。
特斯拉甚至声称,FSD计算机提供了所有必要的处理工作,为“全自动驾驶”汽车提供动力——如果软件赶上的话。
版权保护: 本文由 沃派博客-沃派网 编辑,转载请保留链接: http://www.bdice.cn/html/55728.html


